0
Loading a story
bootstrapping AWS response API...
Research
Simulation of Forward Kinematics of Multiple 6 DoF Manipulators
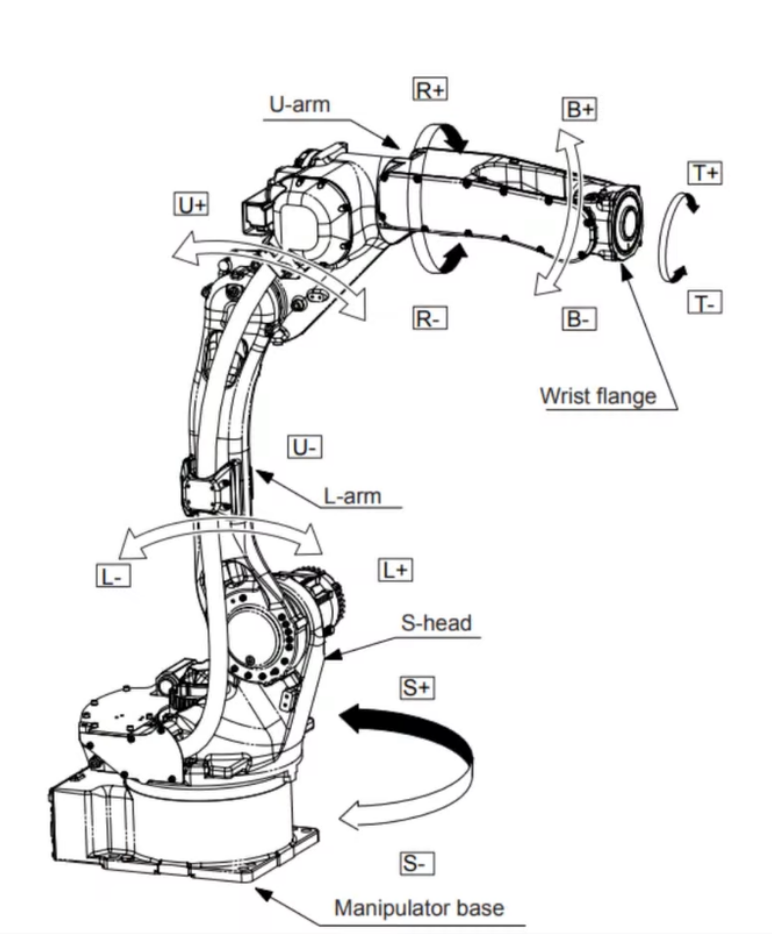
In this study, we will be investigating the full range of motion of a 6-d.o.f. robotic arm. We will simulate the arm and use forward kinematics to determine the position of an end effector throughout the simulation. We will use this simulation to test and compare several 6-d.o.f. designs, in order to determine how changes to the link structure affects the total range of the arm. The simulation will be constructed using the MATLAB robotics toolbox. The simulation will be used to measure and visualize the range of motion of the end effector. We will compare these results to the data sheets of commonly used 6-d.o.f. arms to see how our designs compare to existing solutions.
Research
Simulation of Forward Kinematics of Multiple 6 DoF Manipulators
In this study, we will be investigating the full range of motion of a 6-d.o.f. robotic arm. We will simulate the arm and use forward kinematics to determine the position of an end effector throughout the simulation. We will use this simulation to test and compare several 6-d.o.f. designs, in order to determine how changes to the link structure affects the total range of the arm. The simulation will be constructed using the MATLAB robotics toolbox. The simulation will be used to measure and visualize the range of motion of the end effector. We will compare these results to the data sheets of commonly used 6-d.o.f. arms to see how our designs compare to existing solutions.